About me
I'm a final year PhD student in UW CSE, advised by Prof. Jon Froehlich at the Makeability Lab.
My research focuses on Human–AI Symbiotic Spatial Perception, studying Human–AI alignment in spatial understanding, AI-assisted situational awareness, and the externalization of human spatial knowledge through reality-based interaction.
I'm graduating in summer 2026 and actively seeking full-time industry opportunities as a research scientist/engineer. Please feel free to reach out if you have any opportunities!
Recent Experiences
-

Apple AIML, Seattle
Machine Learning Intern. Apr 2025-Sep 2025
-

Adobe Research, San Francisco
Research Scientist Intern. Jun 2024-Sep 2024
-
Adobe Research, San Jose
Research Scientist Intern. Jun 2023-Sep 2023
-
Microsoft Research Asia, Beijing
Research Intern. Jun 2020-Mar 2021
Education
-

University of Washington
PhD of Computer Science & Engineering, 2021-2026 (est)
-

University of Washington
Master of Computer Science & Engineering, 2021-2024
-
Tsinghua University
Master of Engineering, 2018-2021
-
Tsinghua University
Bachelor of Architecture, 2014-2018
Technical Skills
-
Full-Stack Development
Building real-time interactive applications on web, mobile, AR, and robotics platforms.
-
AI Agentic Systems
Designing and deploying multi-agent pipelines (e.g., LangGraph, MCP, custom toolchains).
-
LLM Benchmarking
Defining evaluation tasks, constructing datasets, assessing model performances.
-
Domain-Specific Languages
Formalizing real-world problem into DSLs for reasoning and structured agent interactions.
-
Computer Vision & Graphics
Structure-from-Motion (SfM), SLAM, 3D reconstruction, Gaussian Splatting, 3D graphics, and scene understanding.
-
Human-Centered Research
Designing and conducting user studies; qualitative and quantitative methods for human insights.
Selected Research Projects
-
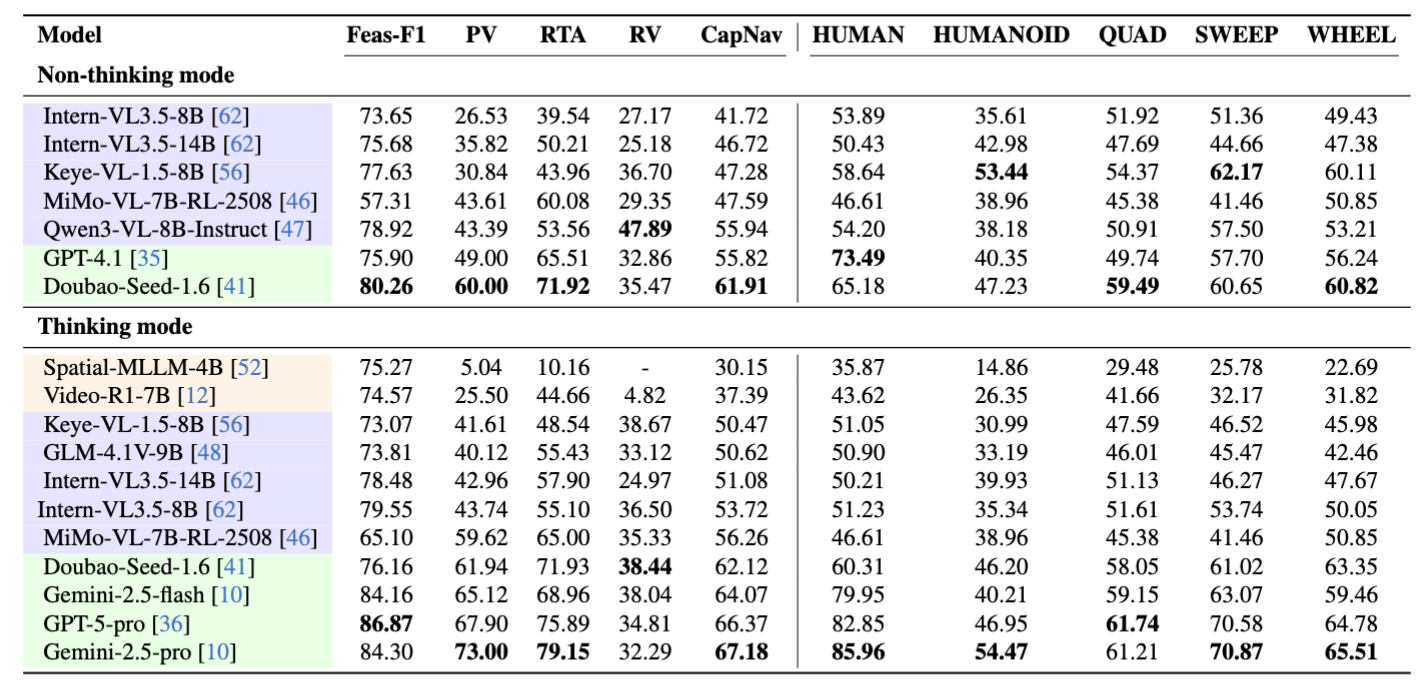
CapNav: Benchmarking Vision Language Models on Capability-conditioned Indoor Navigation
CVPR'26 To Appear
-
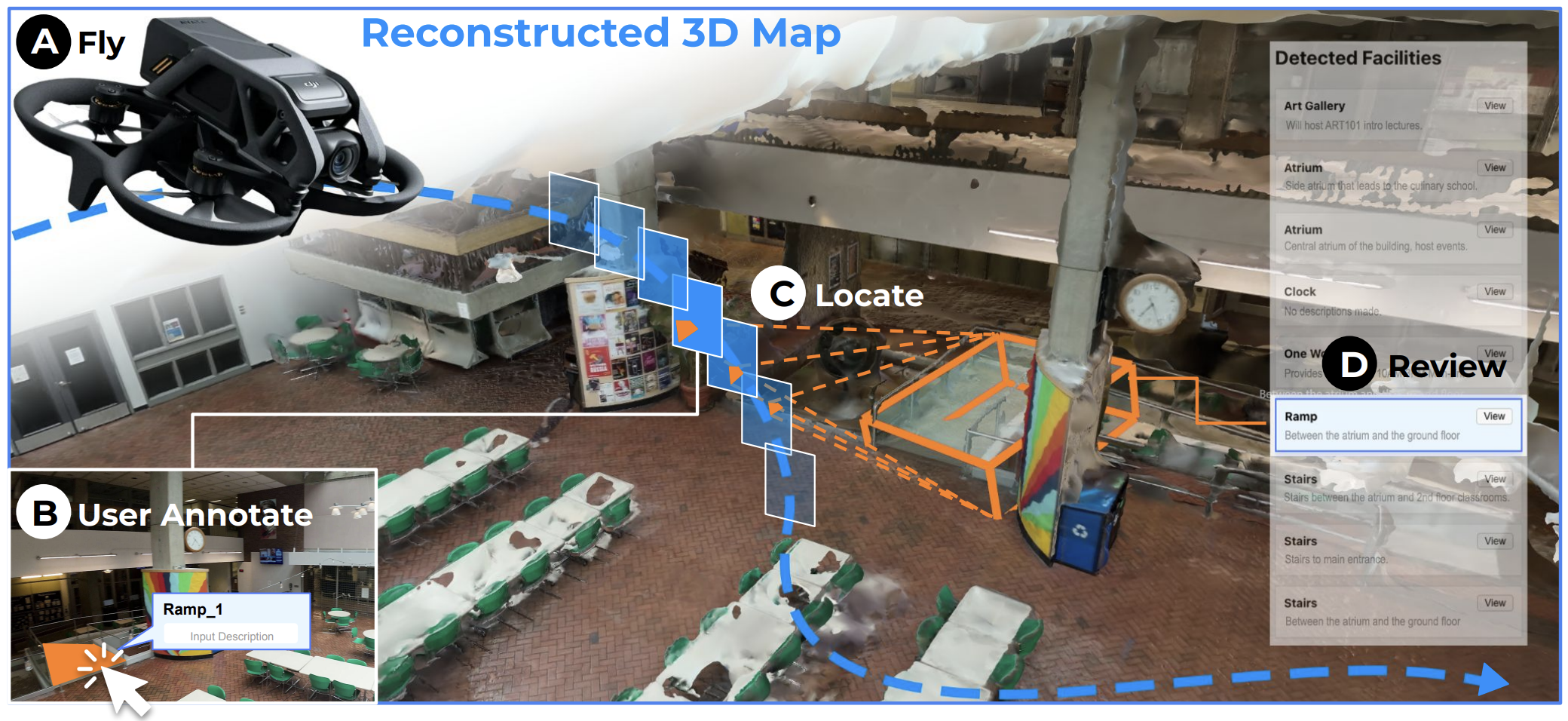
Flymethrough: Human-ai collaborative 3d indoor mapping with commodity drones
UIST'25
-
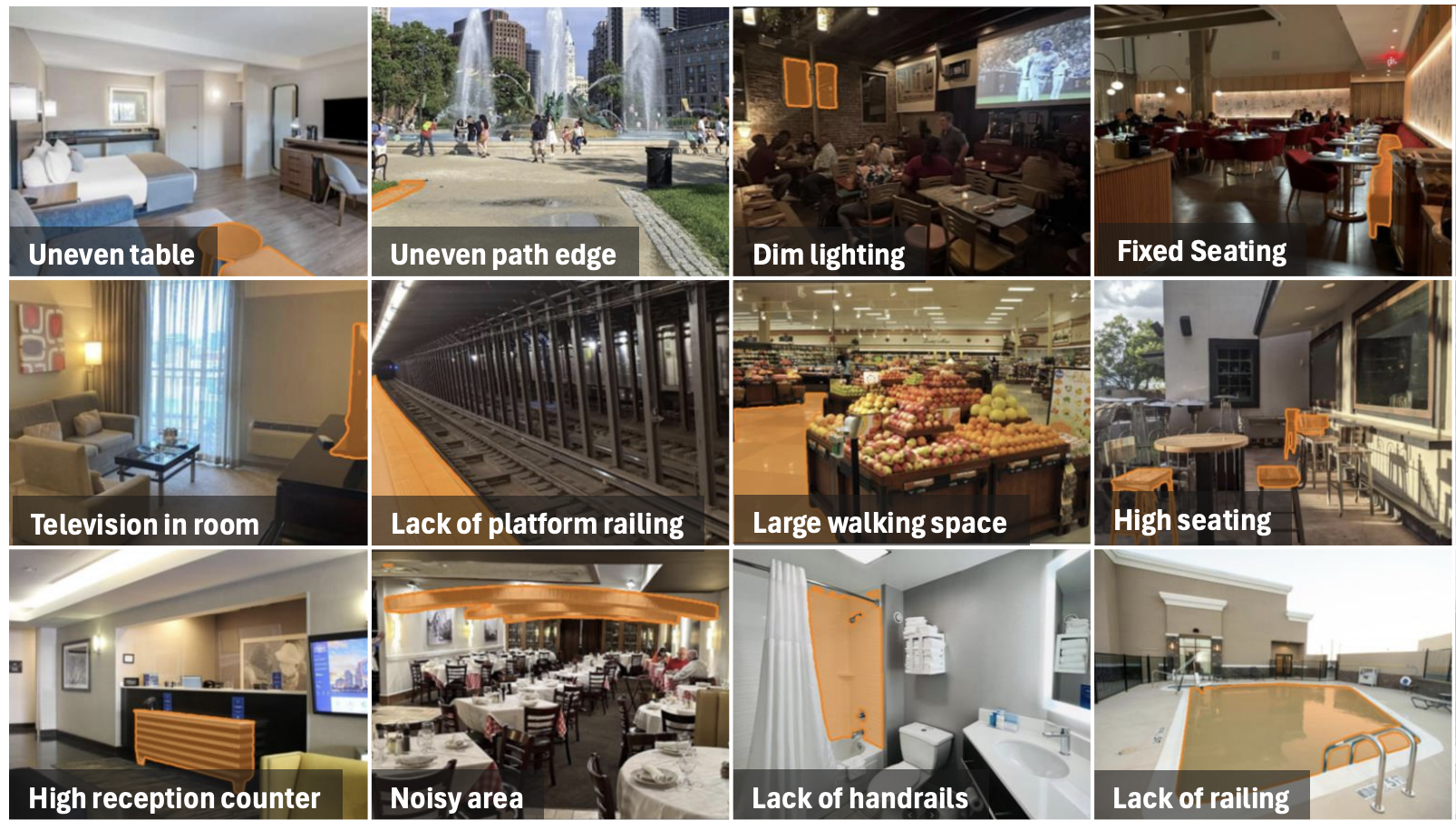
Accessibility Scout: Personalized Accessibility Scans of Built Environments
UIST'25
-
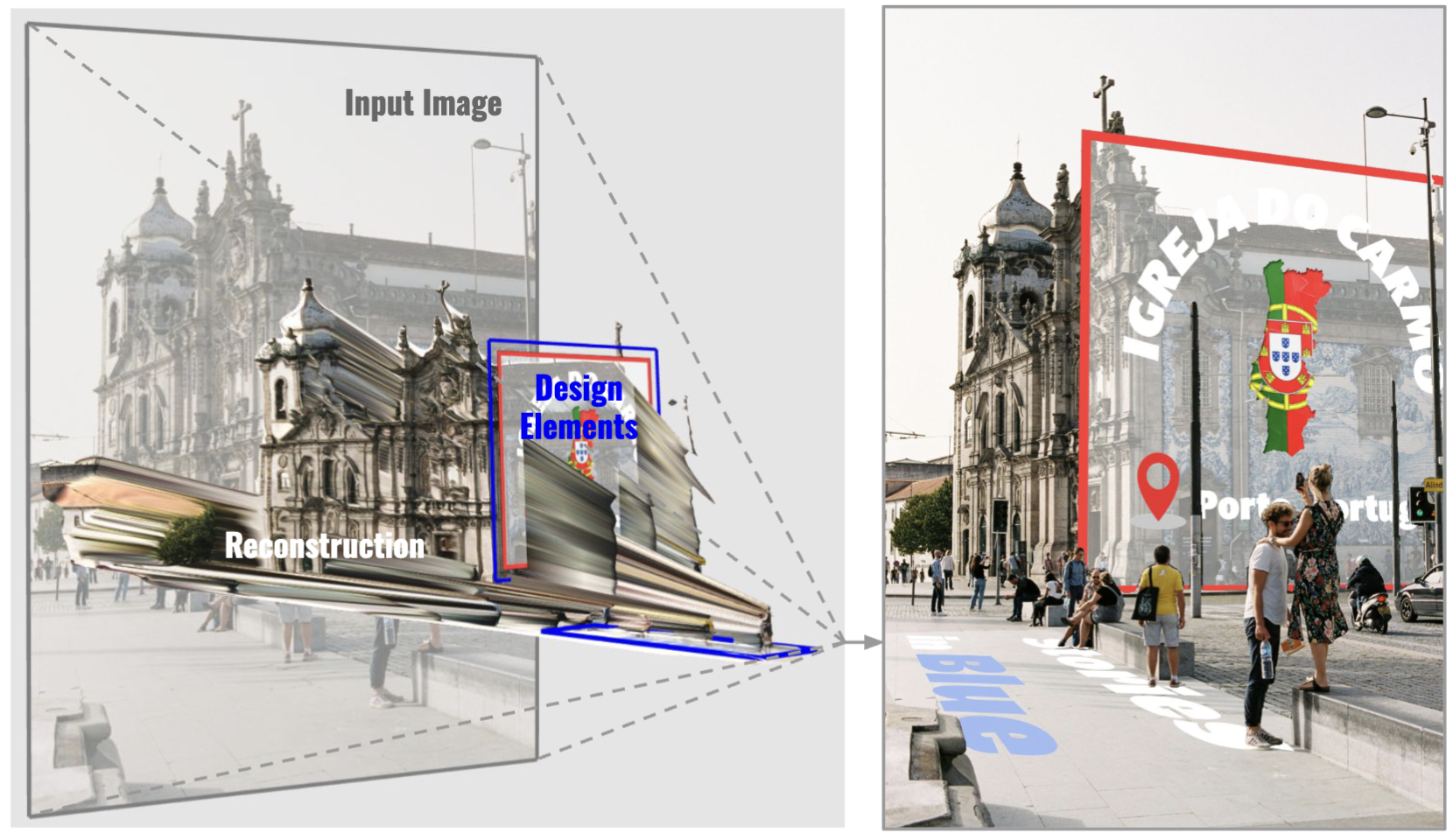
DepthScape: Authoring 2.5D Designs via Depth Estimation, Semantic Understanding, and Geometry Extraction
DIS'26 In Submission, CHI'25 LBW
-
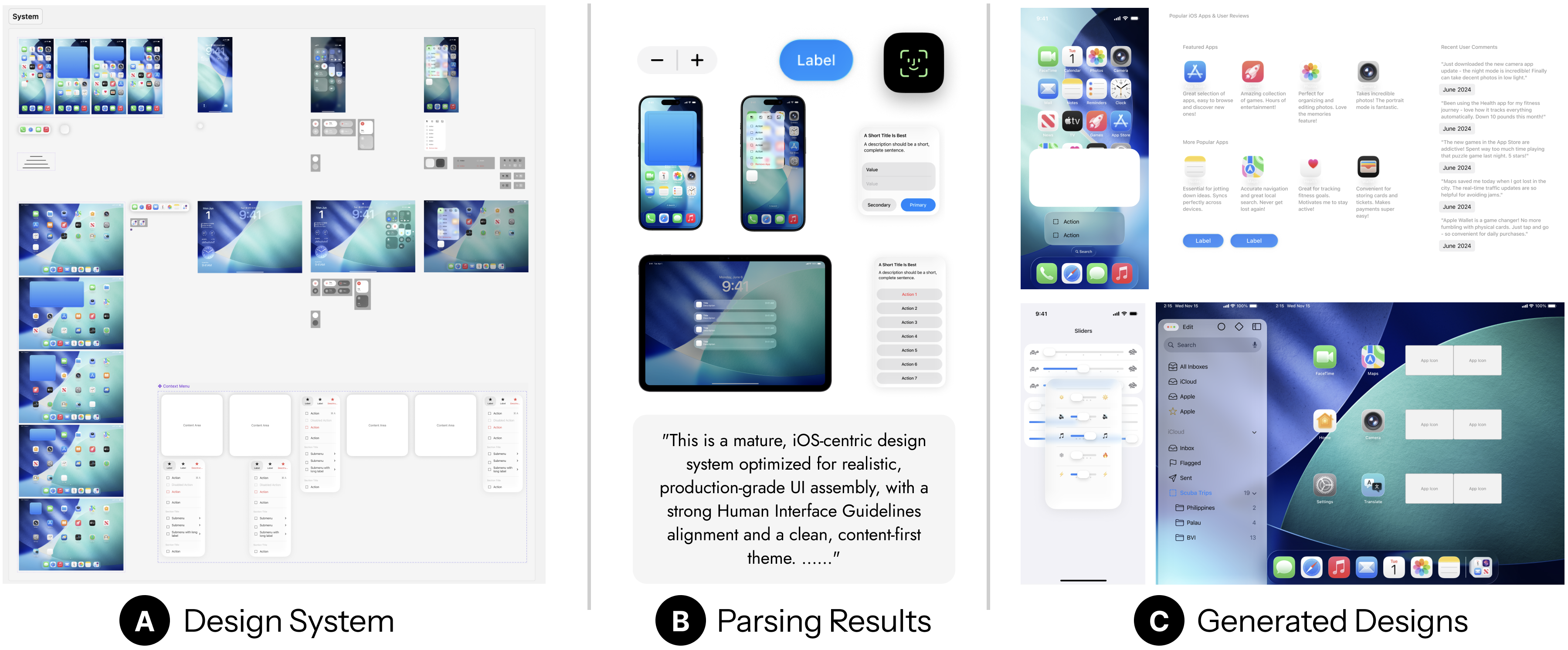
UIConformer: Towards Generating Conformant User Interfaces within Design Artboards
UIST'26 In Submission
-
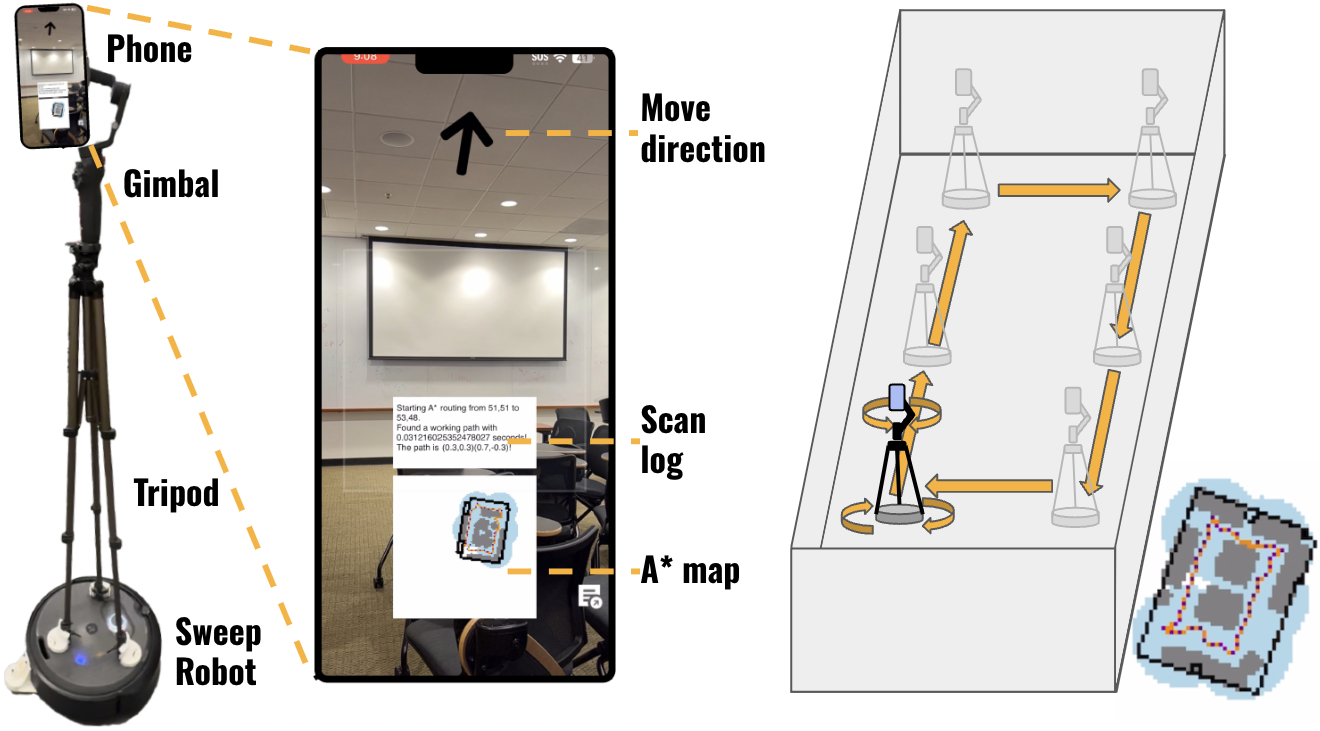
RAIS: Towards A Robotic Mapping and Assessment Tool for Indoor Accessibility Using Commodity Hardware
ASSETS'24 Poster
-
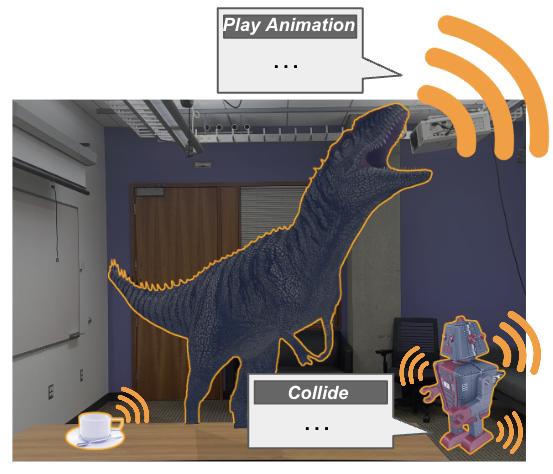
SonifyAR: Context-Aware Sound Generation in Augmented Reality
UIST'24
-
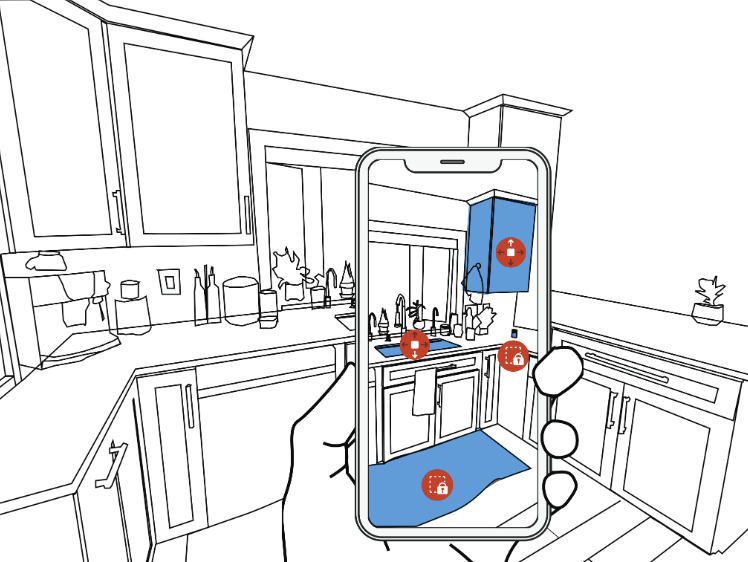
RASSAR: Room Accessibility and Safety Scanning in Augmented Reality
CHI'24
-
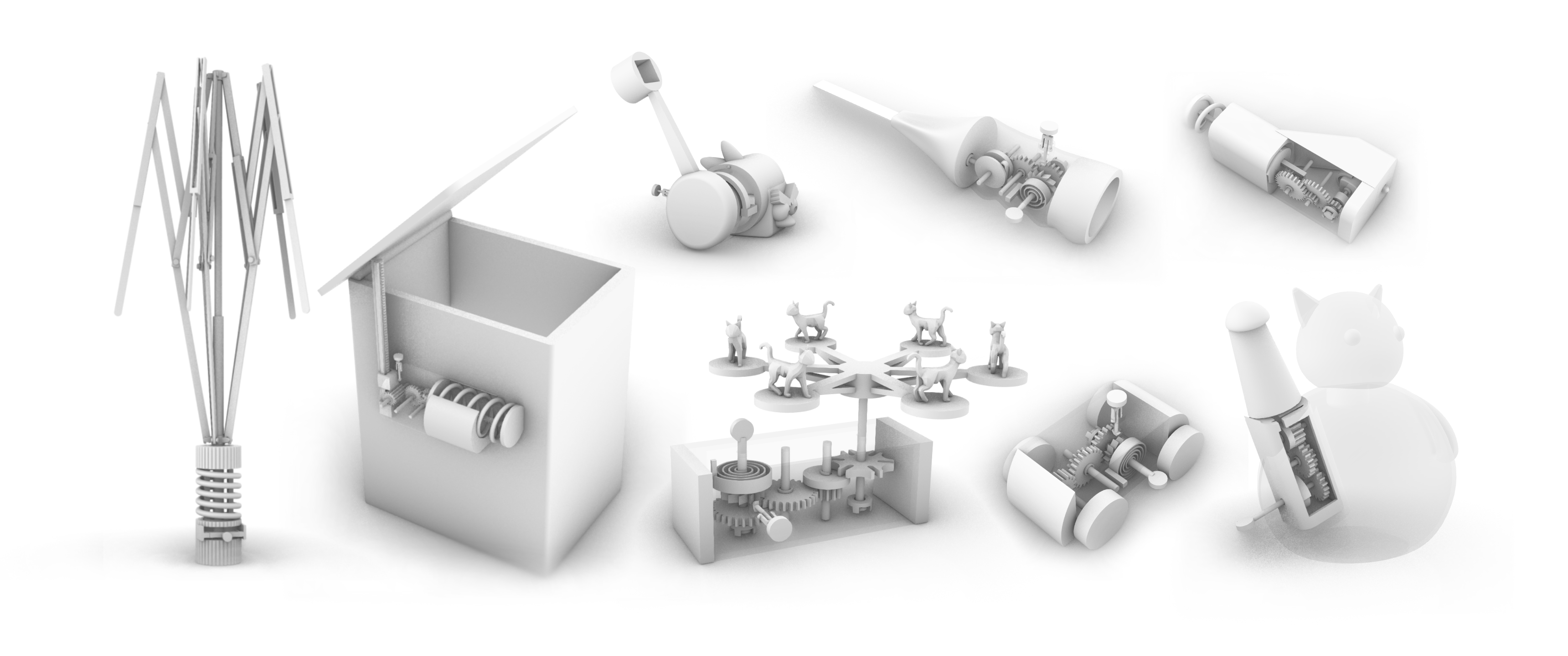
Kinergy: Creating 3D Printable Motion using Embedded Kinetic Energy
UIST'22
-
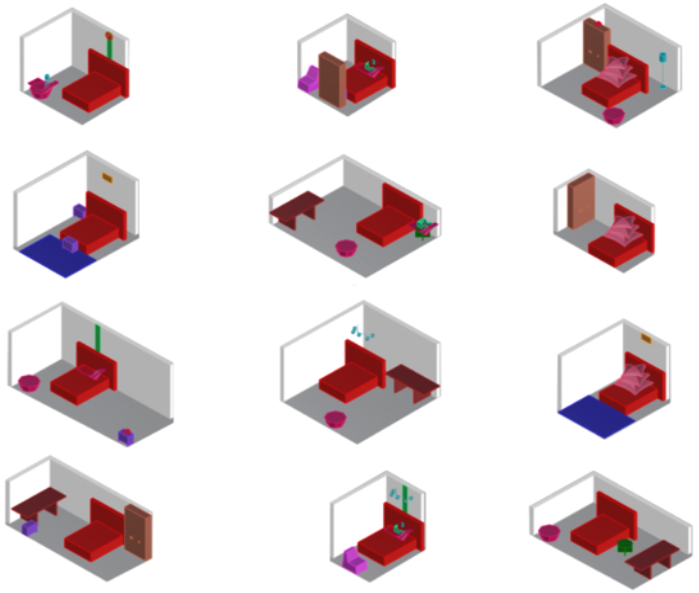
Interior Layout Generation Based on Scene Graph and Graph Generation Model
Design Computing and Cognition’20